The Idea
While playing a roguelike video game, I found myself wondering: How does this game consistently generate a “new” level every time I start a new game?
Inspired by this question, I decided to explore how to implement a procedural level generator in Go. To test the generator, I created a simple text-based dungeon crawler game. This project allowed me to dive into procedural generation concepts and apply them in a fun, hands-on way.
Gameplay
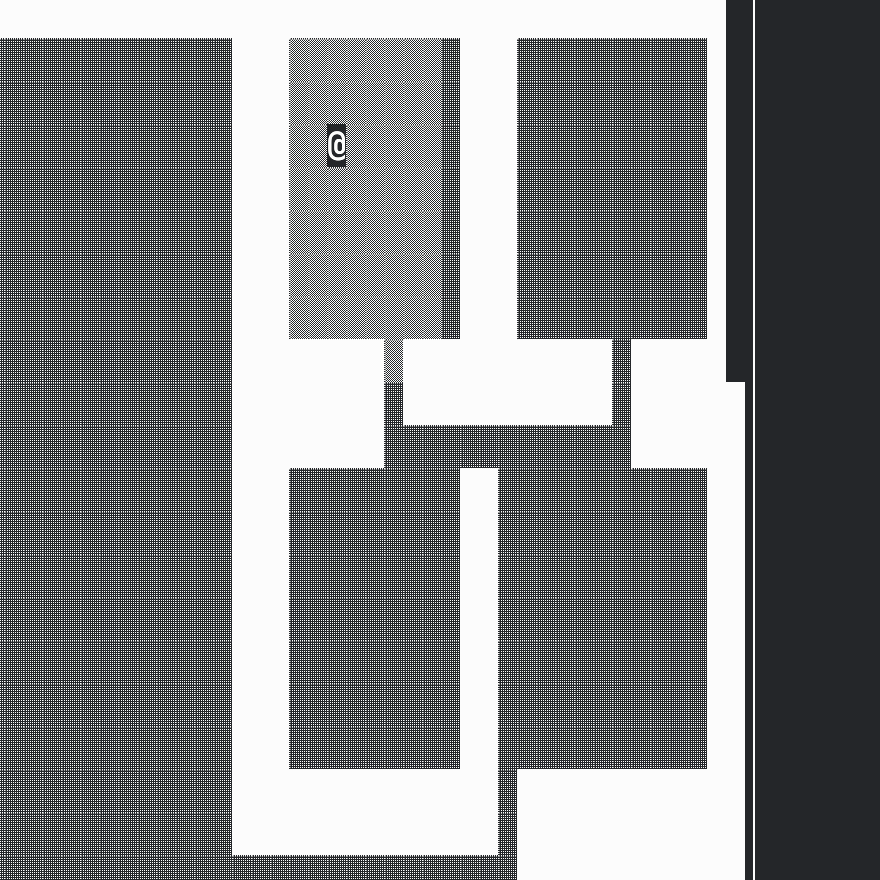
The game itself is intentionally simple: players can move around and discover the map. My main goal was not to create a polished game but to explore and implement the mechanics of procedural map generation.
Here’s a quick demo showing that the game is fully functional, even if minimalistic:
Level Generation
When a new map is generated, it begins as a blank canvas of tiles. In Dungeon, a tile can represent a wall, a floor, or the player. To ensure the game remains playable, the player is placed within a randomly selected room after the map is fully generated, avoiding any chance of being trapped in a wall.
The number of rooms generated in a canvas depends on two factors: seeded randomness and the current difficulty level. Additionally, there’s a hard cap on the partitioning depth to prevent overly complex levels.
Placing rooms using Binary Space Partitionning
When a new canvas is generated, it starts completely filled with walls. The first step in map generation is determining where to place rooms and how large they should be. Using Binary Space Partitioning (BSP), the entire canvas is treated as a root node, and areas within the canvas are recursively partitioned to define room boundaries.
From the BDP article on Wikipedia:

To fill the space, my BSP-based map generation algorithm uses a seeded random number to decide whether to partition a region. The random number, ranging from 0 to 100, must exceed a threshold to trigger a split. This threshold decreases as the difficulty level increases, resulting in more subdivisions and complex maps for higher difficulties.
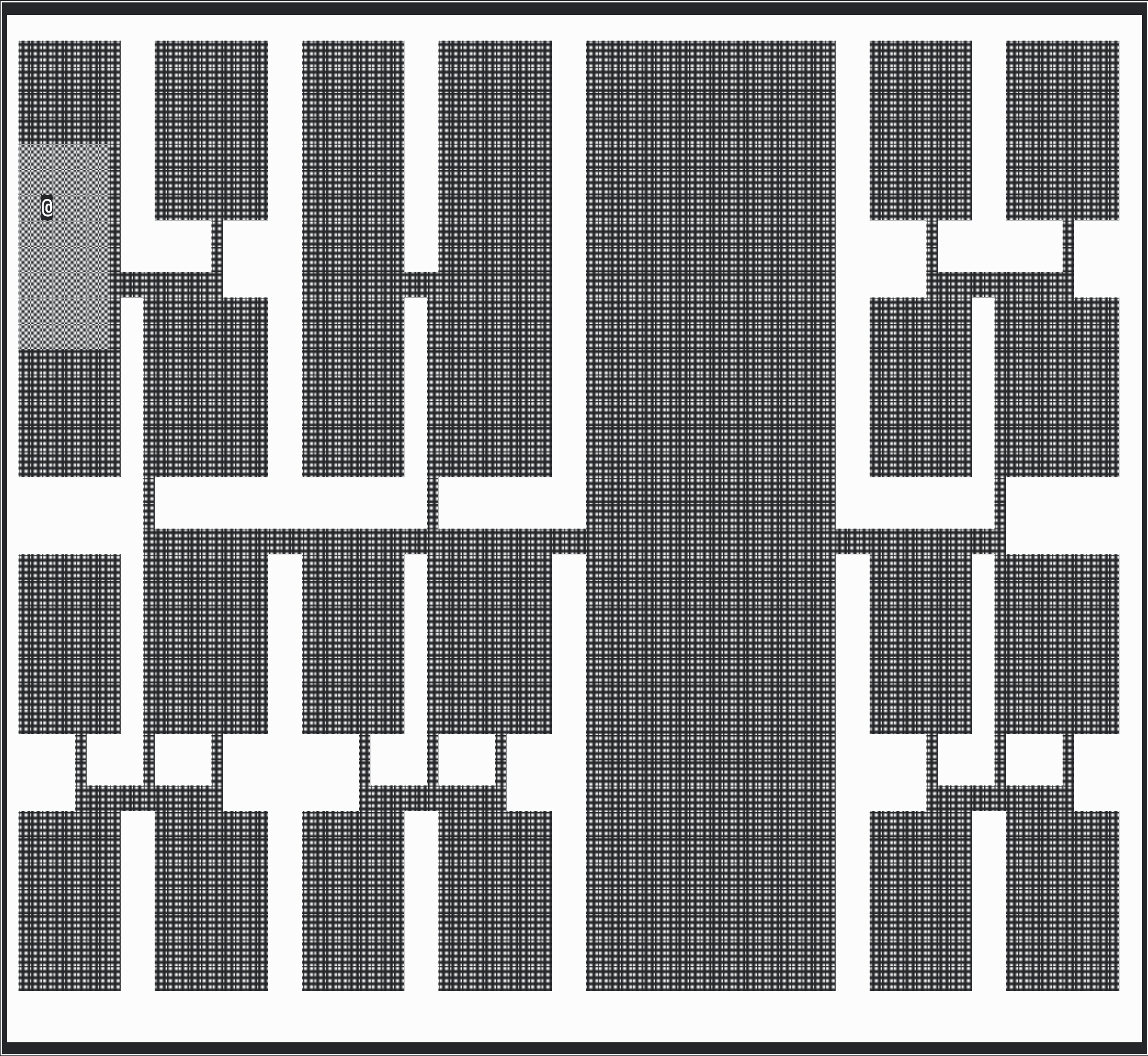
The canvas for the map is created with a fixed size, which makes it challenging to dynamically adjust and place more rooms in heavily partitioned areas. While it’s possible to normalize room sizes to address this, I decided to stick with the simpler approach since my main interest was exploring the BSP algorithm itself.
Here’s the final product: